

Физический энциклопедический словарь - кинематика

Кинематика
Движение любого объекта в К. изучают по отношению к нек-рому телу (тело отсчёта), с к-рым связывают т. н. систему отсчёта (оси х, у, г на рис. 1), позволяющую определять положение движущегося объекта в разные моменты времени относительно тела отсчёта.

Выбор системы отсчёта в К. произволен и зависит от целей исследования. Напр., при изучении движения колеса вагона по отношению к рельсу систему отсчёта связывают с Землёй, а при изучении движения того же колеса по отношению к кузову вагона — с кузовом и т. д. Движение рассматриваемого объекта считается заданным (известным), если известны ур-ния (или графики, таблицы), позволяющие определить положение этого объекта по отношению к системе отсчёта в любой момент времени.
Осн. задача К.— установление (при помощи тех или иных матем. методов) способов задания движения точек или тел и определение соответствующих кинематич. хар-к этих движений (траектории, скорости и ускорения движущихся точек, угл. скорости и угл. ускорения вращающихся тел и др.).
Движение точки может быть задано одним из трёх способов: векторным, координатным или естественным. При векторном способе положение точки по отношению к системе отсчёта определяется её радиусом-вектором r, проведённым от начала отсчёта до движущейся точки, а закон движения даётся векторным ур-нием: r=r(t). Траекторией точки явл. годограф вектора r. При координатном способе положение точки относительно системы отсчёта опреде-
281
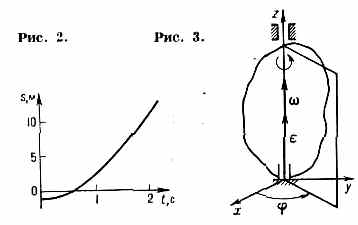
ляется к.-л. тремя координатами, напр. прямоугольными декартовыми х, у, z, а закон движения задаётся тремя ур-ниями: x=f1(t), y=f2(t), z=f3(t). Исключив из этих ур-ний время t, можно найти траекторию точки. Естественный (или траекториый) способ применяется обычно, когда известна траектория точки по отношению к выбранной системе отсчёта. Положение точки определяется расстоянием s=О1М от выбранного на траектории начала отсчёта O1, измеренным вдоль траектории и взятым с соответствующим знаком (рис. 1), а закон движения даётся ур-нием s=f(t), выражающим зависимость s от времени t. Зависимость s от t может быть также задана графиком движения, на к-ром в выбранном масштабе вдоль оси t отложено время, а вдоль s — расстояние (рис. 2), или
таблицей, где в одном столбце даются значения t, а в другом — соответствующие им значения s. Осн. кинематич. хар-ками движущейся точки явл. её скорость и ускорение.
Способы задания движения тв. тела зависят от вида его движения, а число ур-ний движения — от числа степеней свободы тела (см. Степеней свободы число). Простейшими явл. поступательное движение и вращательное движение тв. тела. При поступат. движении все точки тела движутся одинаково, и его движение задаётся и изучается так же, как движение одной точки. При вращат. движении вокруг неподвижной оси АВ (рис. 3) тело имеет одну степень свободы; его положение определяется углом поворота , а закон движения задаётся ур-нием: =f(t). Осн. кинематич. хар-ками явл. угловая скорость и угловое ускорение тела. Зная и , можно определить скорость и ускорение любой точки тела.
Более сложным явл. движение тела, имеющего одну неподвижную точку и обладающего тремя степенями свободы (напр., гироскоп). В этом случае положение тела относительно системы отсчёта определяется к.-н. тремя углами (напр., Эйлеровыми углами), а закон движения — ур-ниями, выражающими зависимость этих углов от времени. Осн. кинематич. хар-ками явл. и тела. Движение тела
слагается из серии элем. поворотов вокруг непрерывно меняющих своё направление мгновенных осей вращения ОР, проходящих через неподвижную точку О (рис. 4).

Самый общий случай — движение свободного тв. тела, имеющего шесть степеней свободы. Положение тела определяется тремя координатами одной из его точек, наз. полюсом (в задачах динамики за полюс принимается обычно центр тяжести тела), и тремя углами, к-рые выбираются так же, как для тела с неподвижной точкой. Закон движения тела задаётся шестью ур-ниями, выражающими зависимости названных координат и углов от времени. Движение тела слагается из поступательного вместе с полюсом и вращательного вокруг этого полюса, как вокруг неподвижной точки. Такими, напр., являются: движение в воздухе артиллерийского снаряда или самолёта, совершающего фигуры высш. пилотажа, движения небесных тел. Осн. кинематич. хар-ки — скорость и ускорение поступат. части движения, равные скорости и ускорению полюса, и угл. скорость и угл. ускорение вращения тела вокруг полюса. Все названные хар-ки (как и кинематич. хар-ки для тела с неподвижной точкой) определяются по ур-ниям движения; зная эти хар-ки, можно вычислить скорость и ускорение любой точки тела. Частным случаем рассмотренного движения явл. плосконаправленное (или плоское) движение тв. тела, при к-ром все его точки движутся параллельно нек-рой плоскости. Подобное движение совершают звенья многих механизмов и машин.
В К. изучают также сложное движение точек или тел, т. е. движение, рассматриваемое одновременно по отношению к двум (или более) взаимно перемещающимся системам отсчёта. При этом одну из систем отсчёта рассматривают как основную (её условно наз. неподвижной), а перемещающуюся по отношению к ней систему отсчёта наз. подвижной; в общем случае подвижных систем отсчёта может быть несколько. При изучении сложного движения точки её движение, а также скорость и ускорение по отношению к осн. системе отсчёта наз. условно абсолютными, а по отношению к подвижной системе — относительными. Движение самой подвижной системы отсчёта и всех неизменно связанных с нею точек np-ва по отношению к осн. системе наз. п е р е н о с н ы м движением. Осн. задачи К. сложного движения заключаются в установлении зависимостей между кинематич. хар-ками абс. и относит. движений точки (или тела) и хар-ками движения подвижной системы отсчёта, т. е. переносного движения (см. Относительное движение).
Для тв. тела, когда все составные (т. е. относительные и переносные) движения явл. поступательными, абс. движение также поступательное со скоростью, равной геом. сумме скоростей составных движений. Если составные движения тела явл. вращательными вокруг осей, пересекающихся в одной точке (как, напр., у гироскопа), то результирующее движение также явл. вращательным вокруг этой точки с угл. скоростью, равной геом. сумме угл. скоростей составных движений. Если же составными движениями тела явл. и поступательные и вращательные, то результирующее движение в общем случае будет слагаться из серии мгновенных винтовых движений.
В К. сплошной среды устанавливаются способы задания движения этой среды, рассматривается общая теория деформаций и определяются т. н. ур-ния неразрывности (сплошности) среды (подробнее см. Гидромеханика, Упругости теория). • См. лит. при ст. Механика.
С. М. Тарг.





См. в других словарях

Вопрос-ответ:


Похожие слова
Самые популярные термины
1 | 1384 | |
2 | 1053 | |
3 | 995 | |
4 | 944 | |
5 | 926 | |
6 | 829 | |
7 | 803 | |
8 | 802 | |
9 | 713 | |
10 | 711 | |
11 | 691 | |
12 | 638 | |
13 | 628 | |
14 | 615 | |
15 | 533 | |
16 | 525 | |
17 | 518 | |
18 | 502 | |
19 | 484 | |
20 | 480 |